In
Where is My Flying Car (Ch. 11), I examine the question of whether you'd want a plane that could fold up into a car and be driven on the streets, or a VTOL type (e.g. a helicopter) that could take off from your driveway and land anywhere. Of course, what you really want is both, but you can't have everything and you have to make some compromises.
Both kinds date from the 30s. The first fully functional fixed-wing flying car was Waldo Waterman's 1937 Aerobile. Waterman in 1932 had built and flown the world's first tailless (“flying wing”) airplane. This was incidentally also the first plane with modern-arrangement tricycle landing gear, with two wheels in the back and a steerable nose wheel. This is considerably more stable and resistant to ground-looping in a crosswind than the old “tail-dragger” configuration. The Arrowbile was by all accounts relatively easy to fly. The wings could be removed, and the fuselage part driven around as a car. Five were built; unfortunately, on top of the difficulty of trying to sell them into the Great Depression, Waterman's financial supporter and promoter died unexpectedly, Waterman himself had a serious illness for a year, and then like almost every other major aviation figure was swept up in the WWII military aviation surge.
Similarly, in the same era Pitcairn had gyros that could land anywhere (most notably the White House lawn). Then of course ten years later there were actual helicopters.
In Chapter 17 I work out what you would like your future flying car to be like, but that is set against some projections of future technology. The autogyro seen in the previous post was carefully designed to be within the constraints of current-day technology at a level affordable to a car owner. In particular, it was designed to use a piston engine instead of a turbine (@ $500,000). The devil is in the details, of course, but it seems like if it were mass-produced, you could get the cost of such a gyro down below $100,000.
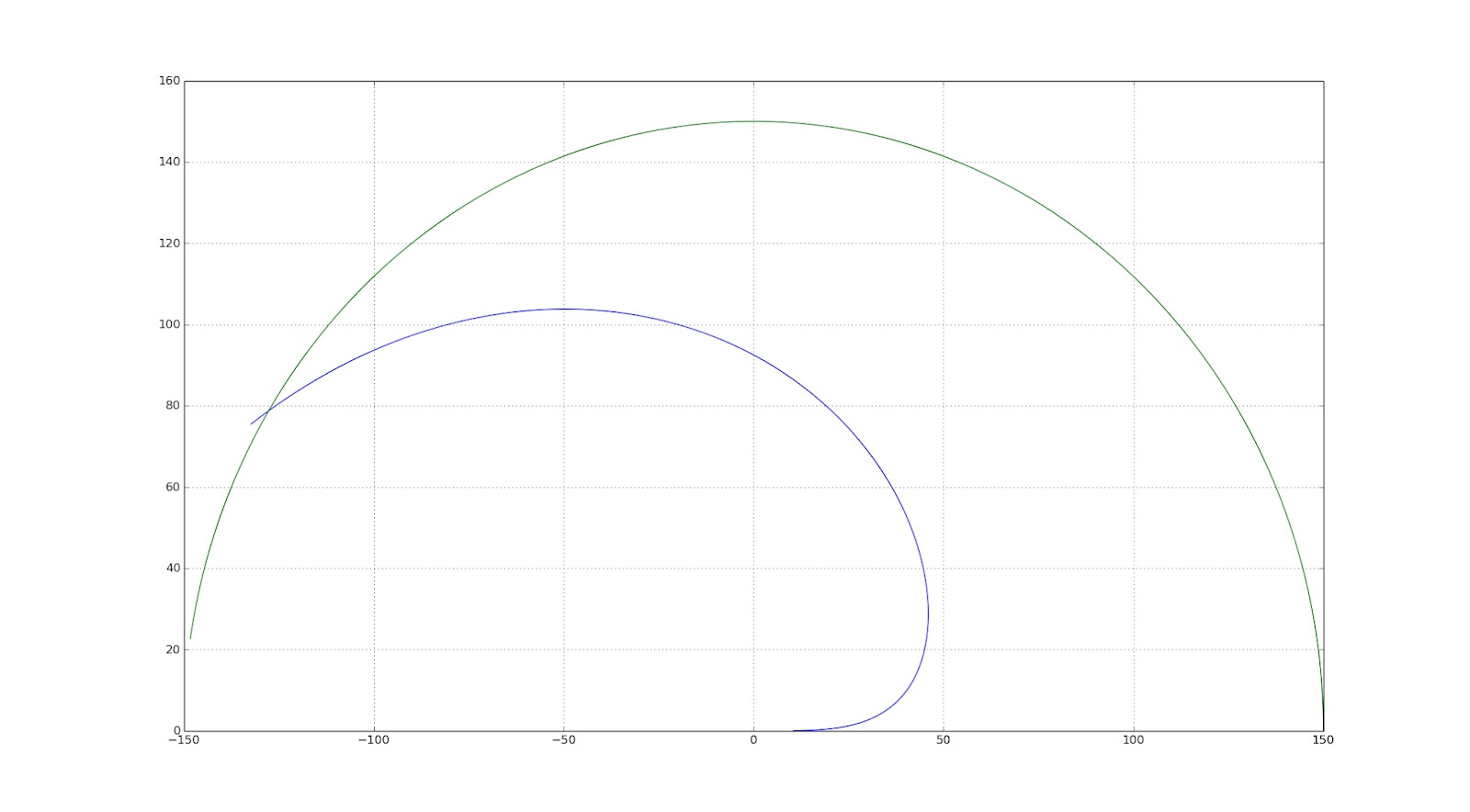
That's about three times the price of the average new car. Our chart tells us that if you can push the cruising speed up to the 125-150 kts range, it will be worth about three times as much as a ground car. That's the same, in terms of travel time, as a private jet which could do 350 en route but required a trip to the airport and a total overhead of an hour per trip.
Going by current prices, the jet (or a turboprop with comparable speed) would cost a couple of million, so in current tech the latency seems easier to finesse than the speed.
There remains the issue of the infrastructure necessary. The automobile did not get to its current useful state without an enormous societal investment in roads, up to and including the interstates. Considerably less would be necessary for gyros, and there is a good deal less of a public goods problem involved. Put a small pad at your house, and you have zero-latency access to the air; put one at your business, and you have made yourself available to a class of well-to-do customers.
The only really tricky thing about the whole business is regulation and air traffic control. There are about 20,000 airports in the US, of which roughly 5000 are open to the general public. Only 500 or so offer commercial flights. In fact there are only about 6000 commercial airplanes. For comparison, there are about 3000 counties in the US, so there are on average between one and two public airports per county, and six or seven including private airstrips.
There are on the order of four million miles of roadway in the US, of which about 2.6 million are paved.http://www.artba.org/government-affairs/policy-statements/highways-policy/ The Interstate system comprises about 50,000 miles of this, and that and 100,000 miles of major state highways carries about half the traffic (vehicle-miles).
The contiguous 48 states have an area of about 3 million square miles. There are about ten miles of altitude accessible to aircraft (two to non-pressurized ones with normally aspirated engines—you and your engine get breathless at about the same point). Under current regulations airplanes need 1000 feet of vertical separation and 5 miles of horizontal (back of the envelope rule of thumb—actually the regulations are quite complex). These regulations are based on a technology where the pilot is looking at an altimeter and controlling his altitude manually (indeed flight levels are defined by barometric pressure, not actual height), and maintaining horizontal separation by verbal interaction with air traffic controllers. Physically, planes can safely fly much closer together if they are going the same speed and direction; think of geese flying in a V-formation. But let's take the current regs as a point of departure.
If you merely parceled out the airspace in lanes at these separations you would have on the order of 30 million miles of high-speed highway—200 times what we have on the ground.
That would mean there is room for six million aircraft in the air at one time (one million non-pressurized). If you cut the separations to a mile, which wouldn't be hard for good electronic controls, you'd have 150 million miles of lanes and the same number of aircraft in the air at once. That's more than there are cars on the roads.
Moulton “Aerocar” Taylor was of course right; the existing air traffic control system would completely break down long, long before that many private planes got into the air. It is surprisingly antediluvian for the twenty-first century. In an era when the distributed control of the internet routes and switches literally trillions of packets of information per second all over the planet, each interaction with ATC is done by voice in English with a live human being. This makes for a system that is often running at the outer edge of its capabilities. Recently (Sept. 26, 2014) a disgruntled employee cut some cables in the Chicago Center and set fire to the building. This created a 91,000 square mile hole in the ATC system. More than 1000 flights were grounded while controllers scrambled to reach alternate facilities as far away as Kansas City. Besides being somewhat fragile and running near capacity, our current ATC system is not easy to expand. It would be simply incapable of handling the orders of magnitude more traffic that generally owned flying cars would involve.
Watch a flock of birds land on and take off from a field, or a seagull tornado doing a continuous rolling dive on a patch of delicious flotsam. It is clear that no possible human ATC could handle such collective flight patterns, but also clear that they are possible with purely local distributed control, using senses and reflexes not impossibly more capable than our own.
When you fly on a clear night you see quite a few more other airplanes than you do in the daytime. That's because they have big bright anti-collision strobes which are visible 25 miles away. With car-density traffic, such strobes would make the sky a confusing Las Vegas-like lightstorm, but they could be replaced with radar-frequency beacons that encoded your car's position, altitude, and course. Your autopilot could read these all in real time and know its situation vis-à-vis every other aircraft nearby at least as well as the seagull does, but on a scale 1000 times as large. We need, roughly, a factor of 20 for our car's speed (500 as opposed to 25 mph), leaving us with a factor of 50 to account for being slower to turn than the seagull. Since we are not intending to be dogfighting, but just merging into and out of traffic flows, this should be plenty.
There are roughly 3 million square miles in the contiguous USA, and 200,000 cellphone towers. That makes one per 15 square miles, for an average distance apart of 4 miles. At cruising altitude you are in view of ten to a hundred of them most of the time. Put a box on each one that looks for and talks to all the aircraft in its area, very similarly as the cell tower already does for pocket phones. Add that to GPS and your flying car can always know exactly where it is, and where every other aircraft in the same state is, to within a foot. Add that to inter-car communication and all that remains is to work out the rules of the road.
It turns out that something like this scheme has been implemented for the North American airspace under the somewhat opaque acronym of ADS-B, for Automatic Dependent Surveillance — Broadcast. Instead of using the 200,000 cellphone towers, it uses 634 custom government-run ground stations. These provide coverage over much, but not all, of the continental US. By 2020, all aircraft operating in certain high-traffic areas (essentially the same ones that require a radar transponder today) will be required to be equipped with ADS-B-Out, consisting of a GPS reciever and a transmitter that broadcasts the plane's position and altitude into the system. Whenever that is done, about once a second, the system transmits position information about traffic in a “hockey puck” 15 miles wide and 3500 feet thick around the airplane back to it. Separate equipment to receive and display this information in your cockpit, ADS-B-In, is available but not required.
As it stands today, the ADS-B system provides air traffic controllers with more complete and accurate information about aircraft, and provides pilots with information they would not have had at all. To some extent, it is an existence proof that a decentralized system is possible, and is a step in the right direction. However, it basically replaces the existing radar network and feeds into the existing centralized air traffic control system. It would still require a major revolution at the ATC level to accomodate generally-used flying cars.
The best chance that has of happening today is by growing out of a decentralized system for drones. There are now ten times as many drones as manned aircraft. The FAA tells us about it:
How will a UAS traffic management system (UTM) work? UTM is how airspace will be managed to enable multiple UAS operations conducted beyond visual line-of-sight (BVLOS), where air traffic services are not provided. The FAA, NASA and industry are partnering to develop UTM to support the real-time or near-real-time organization, coordination, and management of primarily low altitude (< 400 ft AGL) UAS operations.
At the moment all it supports is automatic notification of airports of drone activities in the area, but given the pressure (and an increased willingness to experiment with drones), we may see some real advances.
On the other hand, I have no idea at all how to fix the regulatory logjam. Sorry!